研究方向
人工智能与机器视觉
- 人工智能与机器视觉理论与算法;
- 基于人工智能的防伪;
- 鉴伪理论与技术;
- 自然语言处理;
- 机器人算法与系统。
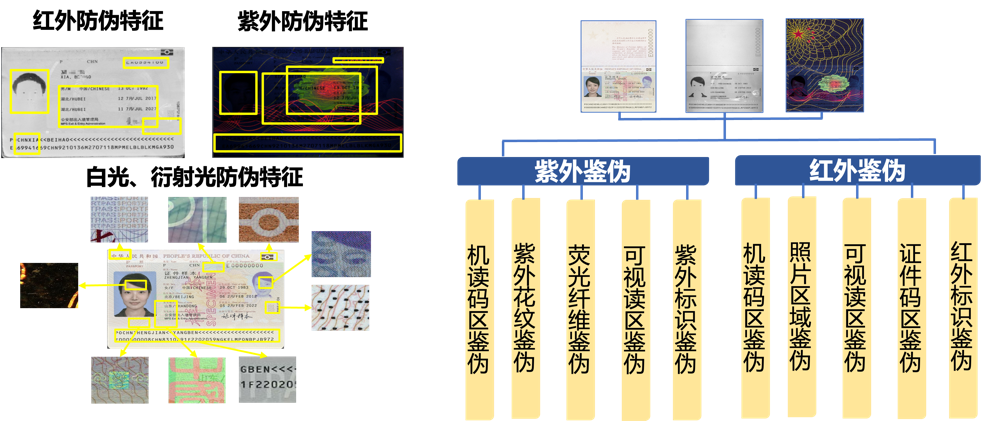
基于人工智能及智能物联相关的防伪、鉴伪理论与技术
提出了基于人工智能的多模态、多视角鉴伪算法。
多模态、多视角、多光谱理论研究
跨模态表征旨在利用不同模态数据之间的互补性,剔除模态之间的冗余,从而获得更为有效的特征表示,提高训练模型的准确性和鲁棒性。本实验室围绕多模态数据的异构特性展开研究并取得显著理论成果,并针对跨模态检索、多模态或多视角学习等内容开发鲁棒算法,成果应用于视频监控、推荐系统等领域。
部分代表性论文:
- Hyperspectral Image Classification via Spatial Window-Based Multiview Intact Feature Learning. IEEE Trans. Geosci. Remote. Sens. 59(3): 2294-2306 (2021)
- Modal-Regression-Based Structured Low-Rank Matrix Recovery for Multiview Learning. IEEE Trans. Neural Networks Learn. Syst. 32(3): 1204-1216 (2021)
- Multiview Hybrid Embedding: A Divide-and-Conquer Approach. IEEE Trans. Cybernetics. 50(8): 3640-3653 (2020)
- Multi-view Common Component Discriminant Analysis for Cross-view Classification. Pattern Recognition , 92:37-51, 2019.
- Multi-view manifold learning with locality alignment. Pattern Recognition 78:154-166, 2018.
- …
图像细粒度分析与识别
细粒度图像具有相似的外观,围绕特征差异较小,局部判别区域定位困难,判别依据难以量化的问题,提出基于弱监督端到端学习的超球体特征编码算法,完成同一大类别下视觉差异极小的细粒度子类别识别,实现目标的精细化分类。相关研究可应用于军事目标检测、海关边检、农林农业、无人零售等领域。


在该领域的研究中,中心已发表A类论文10余篇,专利2项,相关成果在机器人等工程领域得到了实际应用。
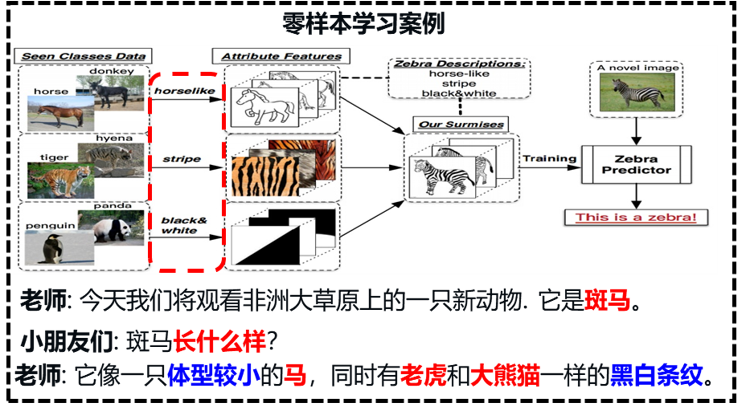
零样本学习
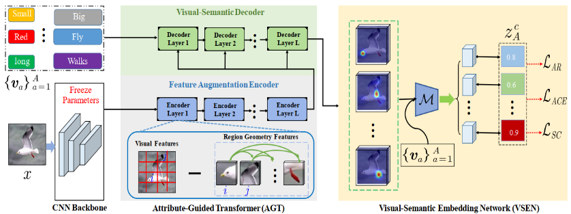
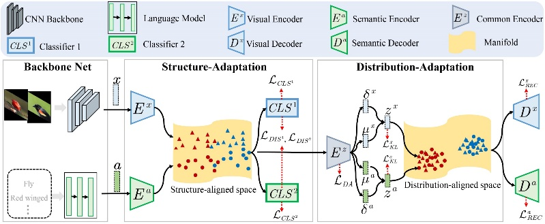
零样本学习旨在通过属性的语义辅助信息的指导下,实现从已知类到未知类的知识迁移,从而识别未知类样本。相关研究被应用于自动驾驶新场景感知、机器人导航、光学字符识别等实际场景。我们针对零样本学习中的跨数据集偏差、视觉-语义特征的异构性、视觉-语义特征的语义表示差异性等问题,分别提出基于特征增强、层次适应、关键公共语义知识挖掘的零样本学习系统方法,相关成果发表于TPAMI/TNNLS/NeurIPS/CVPR/ICCV/AAAI/IJCAI等国际权威期刊和会议。
相关研究已发表A类论文20余篇,专利1项,并得到AI Time等专业AI媒体报道与广泛传播。
部分代表性论文:
- TransZero++: Cross Attribute-Guided Transformer for Zero- Shot Learning. TPAMI, 2022.
- HSVA: Hierarchical Semantic-Visual Adaptation for Zero-Shot Learning. NeurIPS, 2021.
- MSDN: Mutually Semantic Distillation Network for Zero-Shot Learning. CVPR, 2022.
- FREE: Feature Refinement for Generalized Zero-shot Learning. ICCV, 2021
- GNDAN: Graph Navigated Dual Attention Network for Zero-Shot Learning. TNNLS, 2022.
- …
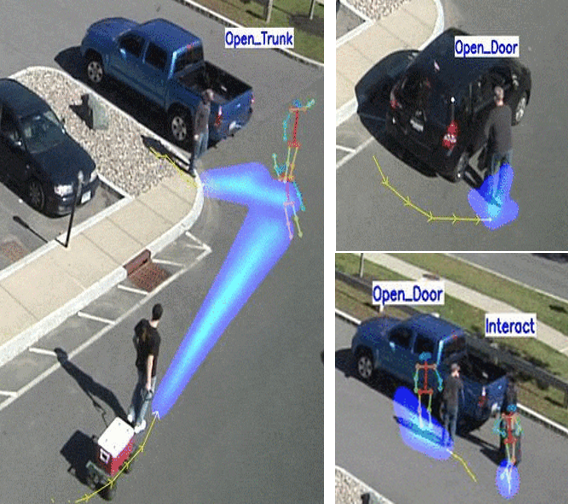
多智能体轨迹预测
多智能体轨迹预测通过智能体在一段时间内的观测轨迹、以及视频的上下文信息,预测其未来某段时间内的所有轨迹。相关研究可被应用于视频行为分析、机器人导航、自动驾驶等实际场景。轨迹预测需要重点研究智能体之间异质的交互关系、场景的多维度运动限制、以及智能体活动的不确定因素等问题。围绕智能体交互关系语义漂移、智能体轨迹的多尺度建模与分析等问题,提出了对应的轨迹预测算法及模型。相关成果发表于Pattern Recognition 、ECCV等国际知名期刊及会议,并申请相关发明专利3项。

此外,相关成果发表A类论文10余篇,专利3项,相关成果被应用于机器人工程项目,取得了“华为杯”中国人工智能创新大赛全国三等奖。
部分代表性论文和专利:
- CSCNet: Contextual semantic consistency network for trajectory prediction in crowded spaces. Pattern Recognition 126 (2022): 108552.
- View Vertically: A hierarchical network for trajectory prediction via fourier spectrums. ECCV 2022: 682-700.
- 一种频域视角下智能体轨迹预测方法、系统、设备及介质
- 一种基于语义一致性的轨迹预测方法及装置
- …
运动评测机器人